
Июль-август 2010
|
Студенческая команда ДВГУ-ДВГТУ, составленная и подготовленная на базе ИПМТ ДВО РАН, победила на молодежном чемпионате мира по подводной робототехнике в классе телеуправляемых необитаемых подводных аппаратов. Соревнования проходили в университете Хило (Гавайи, США) под эгидой международной организации Marine Advanced Technology Education Center (MATE). Основным условием соревнований являлась самостоятельная (силами студентов) разработка, изготовление подводного аппарата, выполнение миссий непосредственно на соревновании и представления материалов разработок в формате проекта |
||||
|




http://www.marinetech.org/rov_competition
|
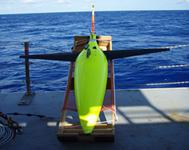
Институт полярных и морских исследований им. Альфреда Вегенера ( Alfred-Wegener-Institut für Polar-und Meeresforschung, AWI) провел полярную экспедицию по исследованию реакции морских экосистем Арктики на глобальное изменение климата. Исследования на ледокольном НИС Polarstern проводились в районе хребта Вестнеса, впадины Моллой (Vestnesa Ridge to the Molloy Hole) в зоне расположения долговременной глубоководной обсерватории HAUSGARTEN, а так же в районе пролива Фрама ( Fram Strait). В работе участвовал AUV типа Bluefin 21 оснащенный СТД зондом, флюориметром, датчиками метана и нитратов, пробоотборниками воды. Аппарат выполнил несколько тестовых погружений на привязи и короткую часовую миссию на дистанцию около 1 км по чистой воде и 1 км подо льдом. Подьем аппарата борт ледокола производился с помощью вертолета. Рабочая глубина AUV - 3000м, масса - 285 кг, длинна - 3,6м, пробег ~ 70 км при скорости 3-4 узла. |
||
|

|
Национальная администраця по океанам и атмосфере (NOAA) в рамках программы Integrated Ocean Observing System (IOOS®) проводит комплексные исследования в районе аварии Deepwater Horizon с помощью группировки AUV типа глайдеров (10 шт.). Аппараты предоставлены рядом научных организаций, университетами и ВМФ США. Центр обработки данных и web-портал находится под управлением университета Rutgers |
||||||
|


http://rucool.marine.rutgers.edu/deepwater/
|
AUV Sentry, спроектированный и построенный в Вудсхоловском океанографическом институте (WHOI) вместо AUV ABE, произвел десятки погружений с общим «пробегом» более 1500 км в районе аварии с НИС Endeavor. Аппарат использовался для сбора данных о физико-химических свойствах водной среды при помощи компактного масс-спектрометра, разработанного совместно с компанией Monitor Instruments. Аппарат выполнил около двух десятков перекрестных галсов в районе выброса нефти.
|
 |
http://www.whoi.edu/page.do?pid=7545&tid=282&ct=162&cid=79926
|
Интересный эксперимент проведен инженерами WHOI с целью тестирование оптического модема ( точка-точка в воде, дистанция ~100м) для управления аппаратом HROV Nereus, ранее использовавшим оптоволоконный кабель сверхмалого диаметра. Разработка ТПА с бортовыми источниками энергии ведется по заказам ведущих подрядчиков (SUBSEA7) подводного строительства на шельфе. Рассматривается возможность исключить из комплекса рабочего ТПА дорогостоящий компонент кабельной системы.
|
|||
|

http://www.seebyte.com/page/aiv
|
Вошло в строй многоцелевое морское транспортное судно «Звездочка», построенное в Северодвинске. Спасательное буксирное суднобыло спроектировано ЦМБК «Алмаз» ( проект 20180).
|
||
Спасательное буксирное судно «Звездочка». Фото: ОАО ЦС «Звездочка» |

http://news.kremlin.ru/media/events/photos/medium/41d305de5fd88bd21ca2.jpeg
Обзор подготовлен Д.Г.Ляховым