


Безэкипажное парусное судно ArgoKnot типа SailBuoy завершило двухмесячное плавание, начавшееся 15 марта в водах Мексиканского залива, проделав путь в 840 миль. ArgoKnot запускался и подбирался новым компактным НИС Университета штата Флорида R/VApalachee. SailBuoy был разработан норвежской инновационной компаниейCMR. Начиная с 2009 г. были проведены несколько длительных автономных плаваний со средней скоростью 1 узел при ветре 5-20 м/с и высоте волн до 5м. Интерес к разработкам парусных безэкипажных судов растет, на пример, американская корпорация Harbor Wing Technologies уже 10 лет планомерно разрабатывает такие системы, однако первые подобные эксперименты по заказу Japan Science Foundation были проведены еще в 2000 г. Безэкипажное судно Kan-chan на базе яхты Yamaha 26 имело автономность около месяца.


В течение недели проходили испытания 11- метрового безэкипажного катамарана SCOAP, изготовленного компанией SeaRobotics дляРод-Айлендского университета, при поддержке NFS. Типовой задачей комплекса станут океанографические работы по трансектам длинной 15-20 км с десятком станций в каждой. Съемка на всех станциях выбранного района будет проводиться с частотой до 4 раз в сутки, выявляя изменчивость свойств среды. Катамаран имеет как встроенные приборы типа ADCP, так и возможность нести автоматизированную лебедку для развертывания других гидрографических приборов, в том числе буксировать ГБО.
http://www.po.gso.uri.edu/~codiga/scoap/deployments.htm
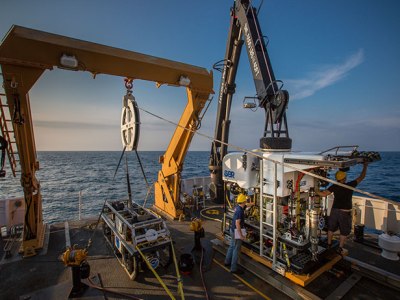
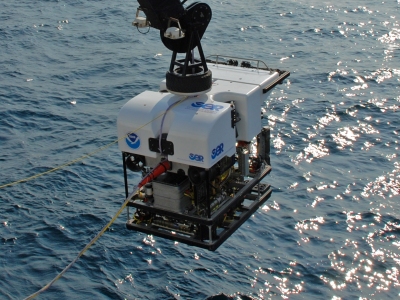
НИС Okeanos Explorer участвует в экспедиции Northeast U.S. Canyons 2013, проходящей в районе подводных каньонов северо-восточного побережья США. Для изучения биологических и геологических особенностей испытывается новый глубоководный подводный аппарат Deep Discoverer (ROV D2) с рабочей глубиной 6000м. В ходе первой части экспедиции за 16 дней было выполнено 16 погружений на глубины от 500 до 2200м, детально обследованы 4 каньона и собрано множество образцов морского бентоса в окрестностях горы Mytilus Seamount. Кроме ROV D2 так же применяется платформа Seirios Camera Sled.
http://oceanexplorer.noaa.gov/okeanos/explorations/ex1304/welcome.html


Европейские исследователи и разработчики подводной робототехники 22-27 июля провели серию экспериментов в рамках проекта MORPH. Морские испытания проходили на базе центра подводных технологий IFREMER в Тулоне. Целью экспериментов было осуществление взаимодействия разнородных необитаемых подводных аппаратов и безэкипажных судов (всего учувствовало 6 ед.) при выполнении задач поиска и освещения подводной обстановки. Подводная навигация и связь между аппаратами обеспечивалась системами компании EvoLogics.
http://morph-project.eu/index.php/news/75-fleet
Обзор подготовил Д.Г. Ляхов