

Исследовательское объединение CIOERT (Cooperative Institute for Ocean Exploration, Research & Technology) провело двухнедельную экспедицию у берегов Флориды (Pulley Ridge) для изучения биоразнообразия и уточнения батиметрии на глубинах от 70 до 300 м. На судне R/V Walton Smith применялись АНПА Bluefin-12 и ТНПА Mohawk.
http://www.fau.edu/hboi/cioert/cioert_exploration.php


На ежегодной военно-ориентированной выставке Sea-Air-Space 2015 (Мериленд, США) были показаны образцы морской робототехники, включая модель безэкипажного катера Common Unmanned Surface Vehicle (CUSV) компании Textron, а также автономные подводные аппараты Large Displacement Unmanned Underwater Vehicle (LDUUV), разрабатываемые US Office of Naval Research (ONR) и новая миниатюрная платформа SandShark компании Bluefin Robotics. Прототип LDUUV обладает автономностью в 30 суток и, как ожидается, увеличит ее до 70 суток. Обеспечивается это соответствующими источниками электроэнергии емкостью порядка 1–2 мегаватт-час. В следующем году запланирован переход из Сан-Франциско в Сан-Диего (~500 миль), а принятие на вооружение планируется не раньше 2020 г. АНПА SandShark по массовым характеристикам на порядок меньше предыдущей модели Bluefin-9 (6,5 и 60 кг соответственно), а диаметр аппарата совпадает с калибром РГБ буя 4,875"/124 мм. Если Bluefin Robotics наладит серийный выпуск SandShark, то этот аппарат может стать самым малым коммерчески доступным АНПА среди представленных сейчас на рынке Iver Nano (18 кг) и LAUV (15 кг).
http://www.seapowermagazine.org/sas15/presentations.html


Альянс ROBEX – Robotic Exploration of Extreme Environments в институте полярных и морских исследований им. Альфреда Вегенера продолжает разработку аппаратов передвигающихся по дну. Работы в этом направлении были начаты более 10 лет назад с колесного прототипа MOVE (MObile VEhicle), сейчас тестируется и готовится к научной работе гусеничный глубоководный TRAMPER.
http://www.robex-allianz.de/en/cat/news/

Во Владивостоке прошли региональные соревнования 2015 MATE Russia-Far East ROV Competition, темой которых стали операции в Арктике и морской добывающей отрасли. Судейство технических докладов велось специалистами Института проблем морских технологий Дальневосточного отделения РАН, которые имеют опыт подготовки студенческих команд и участия в таких мероприятиях с 2008 г. Победила команда RoboCenter из Владивостокского Центра развития робототехники и теперь готовится к международному состязанию, которое пройдет в июне в Канаде. Техническое творчество молодежи не только увлекательно и полезно в образовании, а становится мощным фактором развития, в чем можно убедиться, посмотрев художественный фильм «Spare Parts» (2015), основанный на реальных событиях MATE international ROV competition, проходивших в 2004 году.


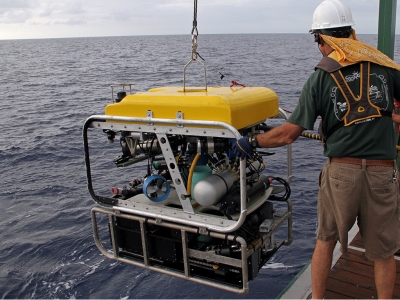
Устройства Bottom Pressure & Tilt Meter (BOPT), ведущие наблюдения за сейсмической активностью в составе распределенной подводной обсерватории OOI Cabled Array в районе подводного вулкана Axial, обнаружили признаки извержения. Три подобных устройства были установлены на глубины около полутора километров в июле прошлого года и подключены к кабельной сети с помощью ROV ROPOS в рейсе TN313 R/V Thomas G. Thompson. Применение АНПА для изучения и высокоточной батиметрической съемки плиты Хуан де Фука начались в 1995 г. Вудсхоловским аппаратом ABE. Позднее в 2006–2009 гг. исследователи MBARI использовали более совершенный АНПА D. Allan B. Съемки, сделанные этим аппаратом до и после подводного извержения 2011 г., позволили определить лавовые наслоения толщиной 20 см, что было описано в статье «Repeat bathymetric surveys at 1-metre resolution of lava flows erupted at Axial Seamount in April 2011» Nature Geoscience Vol. 5, (2012).DOI:
http://www.pmel.noaa.gov/eoi/axial_blog.html
;

Компания Bibby HydroMap представила инновационное решение для подводных инженерных изысканий. Телеуправляемый по кабелю аппарат d’ROP развертывается вертикально вниз на рабочую глубину, причем вертикальные перемещения обеспечиваются компактной лебедкой, способной компенсировать качку. Для работ в диапазоне глубин 0,5–150 м с горизонтальными скоростями до 4-х узлов достаточно небольшого (27,5 м) катамарана с системой позиционирования DP Class 1 и технологической шахтой (Moonpool 2,05 м × 2,30 м), что и определяет экономическую эффективность комплекса.
http://www.bibbyhydromap.com/equipment/drop/
Обзор подготовил Д.Г.Ляхов