
Разработка методов синтеза многоуровневой системы управления манипуляционными подводными роботами, предназначенными для выполнения контактных операций
Аннотация:
Мировой океан — это хранилище огромного количества полезных ископаемых и носителей энергии, а его успешное исследование и освоение невозможно без автономных необитаемых подводных аппаратов (АНПА). Главной целью проекта является создание и исследование новых методов синтеза многоуровневой системы управления интервенционными АНПА, оснащенными подводными многозвенными манипуляторами (ММ) и системами технического зрения (СТЗ). Предлагаемая система будет состоять из согласованно функционирующих подсистем обработки сенсорной информации, планирования поведения, а также динамического управления перемещениями ММ и его робота-носителя.
Предлагаемые разработки позволят в автоматическом режиме выполнять существующие подводные операции даже в сложных погодных условиях, заменяя тяжелый и опасный труд водолазов и расширяя круг работ, выполняемых АНПА. Результаты выполнения исследования будут не только востребованы в будущем, но и существенно расширят область своего применения.
Результатом теоретических и экспериментальных исследований, а также программной реализации и внедрения разработок будет реальный подводный робототехнический комплекс, обладающий принципиально новыми функциональными возможностями и способный качественно и быстро выполнять контактные подводные манипуляционные операции.
Задачи проекта:
- Разработка методов высокоточной визуальной навигации АНПА вблизи объектов работ на основе комплексной обработки данных от бортовых навигационных датчиков и СТЗ.
- Разработка методов идентификации целевых подводных объектов и высокоточного определения формы их поверхностей с учетом возможного заиливания, обрастания и деформации.
- Разработка методов построения траекторий и режимов движения ММ и его робота-носителя, которые обеспечат согласованное планирование поведения АНПА вблизи обнаруженного объекта, построение траекторий ММ с учетом формы поверхности объекта и формирование такой переменной скорости перемещения ММ, при которой безопасно и эффективно будет выполняться требуемая операция.
- Разработка метода синтеза системы позиционно-силового управления АНПА, оснащенными ММ, позволяющей выполнять контактные операции в режиме зависания, оказывая манипулятором желаемое силовое воздействие на поверхность объекта работ, не требуя при этом установки дорогостоящих многокомпонентных сило-моментных датчиков.
- Разработка архитектуры ИУС АНПА, ориентированной на автономное выполнение манипуляционных операций с заданными объектами. В архитектуре будут определены функции и взаимосвязи для функциональных модулей ИУС, включающих все создаваемые в Проекте подсистемы навигации и управления АНПА с ММ, а также содержащую математическое описание целевых объектов базу данных и алгоритмы ее функционирования.
Руководитель проекта: Коноплин Александр Юрьевич – директор ИПМТ ДВО РАН, к.т.н.
Список исполнителей:
Инзарцев Александр Вячеславович – заведующий лабораторией Систем управления ИПМТ, д.т.н.
Юрманов Александр Павлович – научный сотрудник ИПМТ
Красавин Никита Андреевич – научный сотрудник ИПМТ
Пятавин Павел Алексеевич – научный сотрудник ИПМТ
Боровик Алексей Игоревич – старший научный сотрудник ИПМТ, к.т.н.
Василенко Роман Павлович – младший научный сотрудник ИПМТ
Панчук Максим Олегович – младший научный сотрудник ИПМТ
Результаты, достигнутые командой в 2024 – 2025 году в рамках проекта:
– Разработан метод для расчета смещения АНПА по линейным и вращательным координатам вблизи подводных объектов работ или морского дна на основе обработки данных от различных типов СТЗ.
Разработанный метод реализован на языке программирования C++ и успешно протестирован на модели АНПА с ММ в Matlab/Simulink с визуализацией в CoppeliaSim.
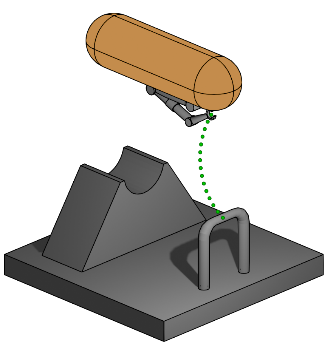
– Разработан метод уточнения математических моделей поверхностей подводных объектов на основе информации, поступающей от СТЗ, а также с использованием специального графического маркера, закрепленного на схвате ММ. Таким образом достигается повышение точности идентификации поверхностей объектов и соответственно точность отработки желаемых траекторий движения схвата ММ, построенных по этим поверхностям. Проведены успешные бассейновые испытания разработанного метода с использованием ММ и СТЗ.

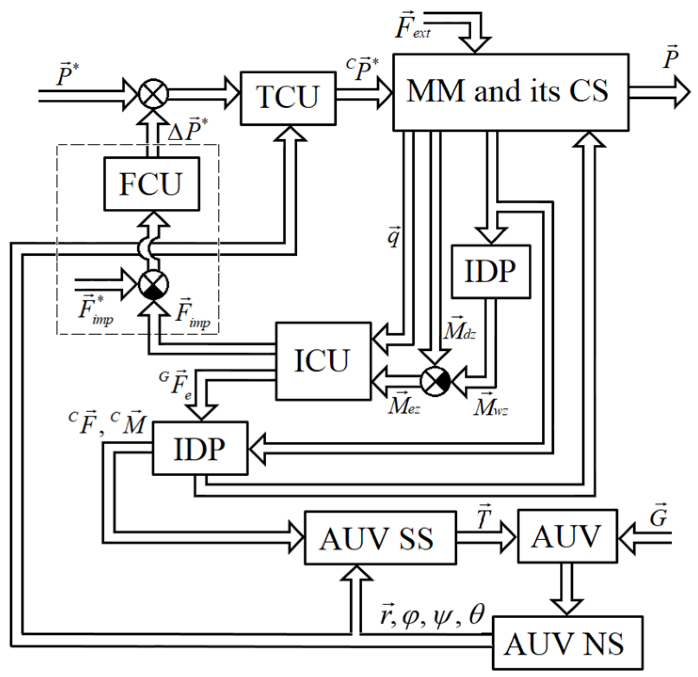
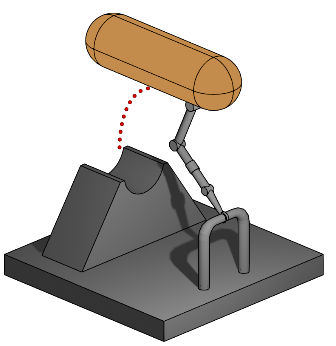
– Разработан метод синтеза системы согласованного позиционно-силового управления АНПА, оснащенными ММ, которая обеспечивает автоматическое выполнение контактных манипуляционных операций в режиме зависания аппаратов вблизи или над объектами работ. Непрерывное оказание заданного силового воздействия ММ на объект осуществляется за счет дополнительного смещения РО в направлении вектора разности векторов желаемого и реального силовых воздействий, спроецированного на ось направления действия желаемой силы.
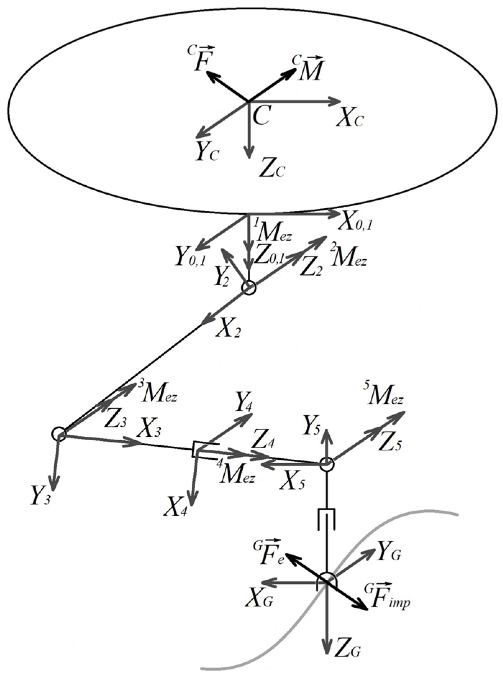
– Выполнена формализация контактных задач, решаемых АНПА с помощью ММ. Сформулированы две основные группы контактных манипуляционных операций – операции, требующие непрерывного оказания необходимого силового воздействия РО ММ на поверхность объекта работ, и операции, при выполнении которых не определена величина силового воздействия на точку контакта, а важно достижение желаемого взаимного расположения РО и поверхности объекта. Также была построена новая модель системы АНПА – ММ для случая, когда схват ММ неподвижно удерживается за элемент подводного сооружения. Для решения обратной задачи динамики было предложено рассматривать точку зацепления схвата как основание ММ, а корпус АНПА считать дополнительным звеном-аппаратом. Предложенная динамическая модель позволяет проводить исследования работоспособности и эффективности разрабатываемых методов стыковки АНПА с подводными стыковочными платформами с использованием бортового ММ, а также методов выполнения манипуляционных операций в процессе удержания АНПА дополнительным ММ.
– Разработано архитектурное решение для создания ИУС интервенционных АНПА, предназначенной для полностью автономного выполнения распространенных технологических манипуляционных операций. Архитектура ИУС определяет взаимосвязи и алгоритмы взаимодействия многоуровневой системы управления АНПА, включающей в себя подсистемы обработки сенсорной информации с СТЗ, визуальной навигации, планирования и формирования команд управления ММ и АНПА, а также позиционно-силового управления робототехническим комплексом для выполнения контактных операций. Архитектура ИУС разработана с учетом возможности тестирования и отладки всех компонентов системы под контролем оператора в диалоговом режиме. Для реализации данного режима ИУС разделена на две отдельные управляющие системы, функционирующие на борту АНПА и ЭВМ поста оператора, с возможностью обмениваться между собой данными.
– Выполнена программно-аппаратная реализация разработанных методов и систем, а также внедрение в АНПА ММТ-3500, оснащенный ММ, созданный в ИПМТ ДВО РАН. Проведены стендовые и бассейновые испытания разработанных методов и систем. Результаты исследований позволили всесторонне исследовать особенности функционирования и подтвердили высокую эффективность предложенных разработок.


Список работ, опубликованных в рамках выполнения проекта:
4. Юрманов А.П., Панчук М.А., Коноплин А.Ю. (Yurmanov A.P., Panchuk M.A., Konoplin A.Yu.) Method for Clarifying Trajectories of Multi-Link Manipulators Mounted on Underwater Vehicles 2023 International Ural Conference on Electrical Power Engineering (UralCon) (2023 г.)
6. Коноплин А.Ю., Пятавин П.А. (Konoplin A.Yu., Piatavin P.A.) Метод автоматической стыковки необитаемых подводных аппаратов с подводными платформами с использованием бортовых многозвенных манипуляторов Подводные исследования и робототехника (2024 г.)
8. Коноплин А.Ю., Красавин Н.А., Юрманов А.П., Пятавин П.А., Костенко В.В., Быканова А.Ю. (Konoplin A.Yu., Krasavin N.A., Yurmanov A.P., Piatavin P.A., Kostenko V.V., Bykanova A.Yu.) Разработка комплекса методов для автономного выполнения технологических операций манипуляционными подводными аппаратами Вестник Дальневосточного отделения Российской академии наук (2024 г.)