




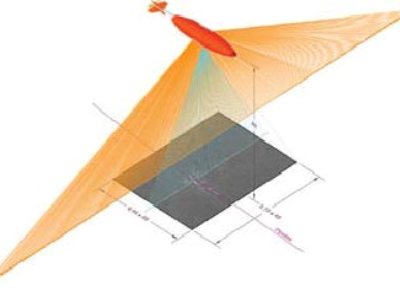

Лазерные сканеры, широко распространенные в геодезии и многих других областях машинного зрения, находят все большее применение в подводных исследованиях. Система ULS-500 производства компании 2G Robotics была установлена и продемонстрировала работоспособность на АНПА HUGIN принадлежащем подрядчику C & C Technologies. В настоящее время основным средством, применяемым для получения трехмерных изображений подводных объектов – микробатиметрии (Microbathymetry) являются многолучевые эхолоты, однако, кроме ограничений по точности и плотности акустических съемок они являются крайне дорогостоящими системами. Лазерные системы в силу оптических свойств среды, конечно, не смогут полностью заменить акустические, но там где, это позволяет прозрачность, соотношение цена/качество может быть улучшено на порядок.
http://www.2grobotics.com/successful-subsea-laser-scanner-demonstration-by-c-c-technologies/
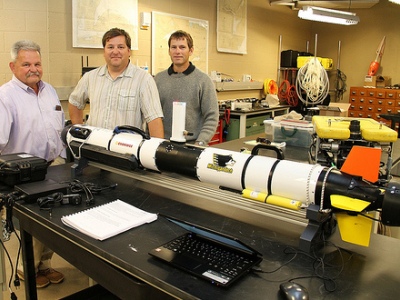

Центр изучения Великих озер (GreatLakesResearchCenter) получил первый экземпляр новой модели компактного АНПА IVER 3, весом около 20кг. Объектом пристального внимания специалистов являются подводные трубопроводы Line5 пролива Макино, соединяющего озера Гурон и Мичиган. Если прежде, с использованием ТНПА для их обследования требовалось несколько недель, теперь уйдет всего несколько часов. Основой полезной нагрузки IVER 3 является двухчастотный интерферометрический ГБО Edgetech 600/1600 кГц. Аппарат способен обследовать около 50 погонных километров за 12 часов.
http://www.mtu.edu/news/stories/2013/october/story98363.html
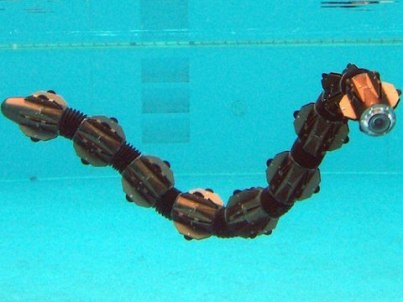

На конференции IEEE IROS 2013 и параллельно проходящей выставке iREX 3-8 ноября в Токио были представлены некоторые разработки амфибийной робототехники, использующие бионические принципы. Среди них робот-змея ACM-R5H японской компании HiBot и аппарат RHex, разработки канадского университета Макгилла.
http://spectrum.ieee.org/automaton/robotics/robotics-hardware/iros-2013-rhex-ninja-legs
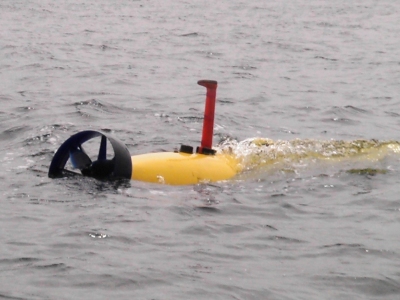

АНПА Reliant типа Bluefin-21 за 106 часов совершил переход из Бостона в Нью-Йорк, пройдя 507км. Большая часть пути была пройдена на глубине около 10 метров со средней скоростью 2,5 узла. Подвсплытия для GPS обсервации и сеансы связи Iridium проводились каждые 20 км пути. Источником энергии АНПА служила литий полимерная батарея емкостью 40 кВт*час, дополнительные секции которой были установлены вместо сонара LFBB. Стандартная конфигурация Bluefin-21 содержит батарею в 13,5 кВт*час, что дает пробег около 100 км, за 20 часов, при работающей полезной нагрузке.
Обзор подготовил Д.Г.Ляхов


