




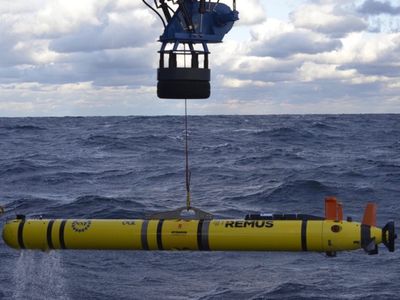
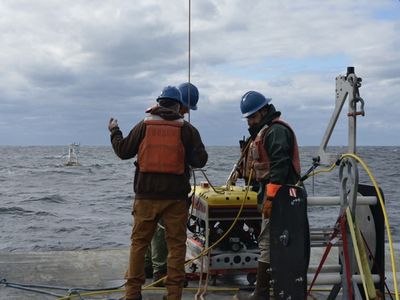
В 17-м рейсе НИС Neil Armstrong на шельфовую обсерваторию Pioneer Array, при обслуживании буйковой станции, возникли неполадки. Для обследования несработавшего акустического размыкателя, пришлось применить ТНПА Falcon, кроме того, аппарат застропил зонд типа Rosetta, который потеряли летом, а теперь благополучно достали с глубины 445 м. Успели поработать и автономные аппараты. Два АНПА типа REMUS-600 выполнили каждый по одной 24 ч миссии, запускался глайдер №363, типа Slocum.
https://www2.whoi.edu/site/pioneer17/
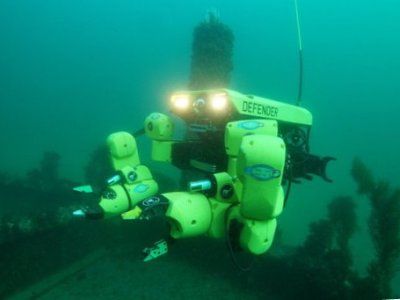

Компания RE2 Robotics продолжает получать финансирование от ВМС США для создания более ловких манипуляторов для подводных аппаратов. В перспективе система MDMS (Maritime Dexterous Manipulation System) должна будет производить разминирование автономно. Ранее, в 2019 г., компания получила $3 млн от Office of Naval Research в рамках проекта STARFISH (Strong Tactile mARitime hand for Feeling, Inspecting, Sensing and Handling). Прототипы, состоящие из двух 6-ти степенных манипуляторов, грузоподъемностью по 5 кг испытывались в морских условиях на ТНПА типа SeaBotix vLBV и VideoRay Defender.


Saab Seaeye получила крупный заказ на 10 ТНПА нового типа eWROV для Ocean Infinity. Аппараты оснащаются 7-ми степенными электрическими манипуляторами собственной разработки. Электрический eWROV функционально аналогичен гидравлическому ТНПА рабочего класса мощностью 250 л. с., но предполагает меньшие эксплуатационные расходы и воздействие на окружающую среду. Многозвенные электрические манипуляторы теперь собираются ставить и на легкие аппараты, к примеру, модель Blueprint Bravo уже тестировалась на ТНПА Falcon.
https://www.youtube.com/watch?v=AFJEVxM5AJU


Донный автономный аппарат Benthic Rover II попал на обложку ноябрьского выпуска Science Robotics. Уже 25 лет исследователи из MBARI с помощью таких инструментов изучают донные сообщества и процессы реминерализации углерода. Последние 10 лет Benthic Rover II работал на участке Station M, на глубине 4 км, в 225 км от калифорнийского прибережья. Батарей общей емкостью 20 кВт∙ч хватает на год работы, в течении которого аппарат проползает около 1,5 км., затем, его поднимают на судно, обслуживают двое суток и снова отправляют на дно. Раз в 3 месяца статус и примеры данных передаются посредством гидроакустических модемов и спутниковой связи безэкиапжного плавсредства типа Wave Glider.
https://doi.org/10.1126/scirobotics.abl4925
Обзор подготовил Д.Г.Ляхов


