|
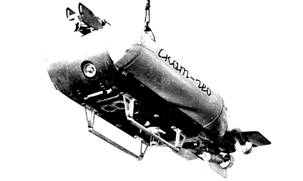 АНПА «Скат-гео». Создан по заказу ЦНИИГАиК в 1976 г. на основе АНПА «Скат» - первого в стране экспериментального АНПА с программным управлением и гидроакустической навигацией для решения исследовательских задач на шельфе. Испытания и опытные работы проводились на геодезиическом полигоне в Белом море (1978). После модернизации в 1991-1992 г.г. использовался совместно с ТПА «Макс-2» для биологических исследований на Тихоокеанском побережье Дальнего Востока. АНПА «Скат-гео». Создан по заказу ЦНИИГАиК в 1976 г. на основе АНПА «Скат» - первого в стране экспериментального АНПА с программным управлением и гидроакустической навигацией для решения исследовательских задач на шельфе. Испытания и опытные работы проводились на геодезиическом полигоне в Белом море (1978). После модернизации в 1991-1992 г.г. использовался совместно с ТПА «Макс-2» для биологических исследований на Тихоокеанском побережье Дальнего Востока.
|







