|
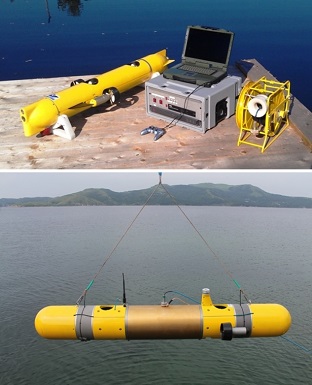 Малоразмерный ТНПА «Чилим» (2014) - предназначен для решения специальных задач, поиска и уничтожения опасных подводных объектов в прибрежнх морских акваториях. Проект выполнен при научно-техническом сотрудничестве с ФГУП «Российский Федеральный Ядерный Центр – Всероссийский НИИ технической физики имени академика Е.И Забабахина» (РФЯЦ-ВНИИТФ, г. Снежинск). На базе ТНПА «Чилим» создан гибридный глайдер «Монитор» с гидравлической системой регулирования плавучести. Малоразмерный ТНПА «Чилим» (2014) - предназначен для решения специальных задач, поиска и уничтожения опасных подводных объектов в прибрежнх морских акваториях. Проект выполнен при научно-техническом сотрудничестве с ФГУП «Российский Федеральный Ядерный Центр – Всероссийский НИИ технической физики имени академика Е.И Забабахина» (РФЯЦ-ВНИИТФ, г. Снежинск). На базе ТНПА «Чилим» создан гибридный глайдер «Монитор» с гидравлической системой регулирования плавучести.
|







