




Исследование и разработка необитаемых подводных робототехнических систем и комплексов
История становления и развития подводной робототехники насчитывает более 40 лет. За этот сравнительно небольшой период произошли большие изменения в средствах и методах организации, создания и применения подводных робототехнических систем и их комплексов. Существуют три типа необитаемых пподводных аппаратов (НПА): буксируемые (towed), телеуправляемые привязные (cable controlled, tethered) и автономные (autonomous).
Буксируемые НПА (БНПА) используются для обследования больших площадей при поиске затонувших объектов, а также для производства различного рода океанографических измерений. Они оснащаются поисковой аппаратурой, измерителями физических и химических параметров водной среды. С буксирующим судном аппараты связаны трос-кабелем, по которому осуществляется передача электроэнергии и информации. С увеличением глубины погружения и удлинением трос-кабеля значительно возрастают трудности в эксплуатации комплекса «судно–аппарат», увеличиваются массо-габаритные характеристики судового оборудования. Последнее, в конечном счете, приводит к увеличению водоизмещения судна-буксировщика, стоимости его эксплуатации. Однако буксируемые системы отличаются большей оперативностью в получении информации, что имеет существенное значение при производстве поисковых работ.
Телеуправляемые привязные НПА (ТНПА) являются, как правило, рабочими аппаратами, предназначенными для подъема затонувших объектов, выполнения разнообразных рабочих действий под водой. Они могут применяться также для обследования объектов и локальных районов дна. ТНПА оснащаются различными исполнительными устройствами в зависимости от характера работ. Наиболее распространенные и универсальные органы – манипуляторы, выполняющие двигательные функции рук человека. Фототелевизионные установки обеспечивают обследование объектов, рельефа дна, документирование ситуаций и контроль работы манипуляторов. Для наведения ТНПА на объект работы используются, как правило, гидроакустические станции. Аппаратам данного типа присущи достаточно высокая маневренность и ограниченный радиус действия. В последующие годы применение оптоволоконных кабелей позволило значительно расширить рабочие функции ТНПА, в особенности при выполнении осмотровых работ и инспекции различных подводных сооружений.
Автономные аппараты вначале использовались в основном для военных целей, в частности, для поиска, опознавания и уничтожения мин, имитации подводных целей, в качестве самонаводящегося оружия, а также для подледных исследований. В дальнейшем АНПА стали использоваться главным образом как информационные роботы, которые могут успешно решать исследовательские задачи по изучению Мирового океана.
Практика создания и применения НПА показывает, что АНПА занимают ведущее место в многоцелевом робототехническом комплексе. Современные АНПА представляют собой новый класс управляемых объектов с присущими им задачами и практическим применением, особенностями технологии и составом систем. При этом системы, входящие в АНПА и судовое оборудование, отличаются большим разнообразием по назначению и физическим принципам их работы, что порождает достаточно жесткие и противоречивые требования к технологии конструирования и внутренней системной организации. Расширение функциональных возможностей АНПА связано также с решением ряда новых теоретических задач. В первую очередь это задачи управления, навигации и связи, ориентирования наности, сбора и накопления информации о среде и, наконец, обеспечения безопасности аппарата в штатных режимах и в особых ситуациях.
Наиболее значительные результаты в последнее время стали возможны благодаря корпоративности и участию в разработках специализированных фирм по оснащению подводных аппаратов системами промышленного изготовления на основе международных стандартов, измерительными приборами и научным оборудованием.
В настоящее время в мировой практике накоплен значительный методологический и практический опыт создания и использования подводных робототехничеких систем для решения научно-исследовательских и прикладных задач в интересах различных отраслей. Прогресс в данной области заключается в создании более совершенных систем, технологий и многофункциональных комплексов, обеспечивающих решение широкого спектра задач в условиях сложной подводной среды. При этом установилась определенная специализация НПА: поисковые буксируемые, рабочие телеуправляемые по кабелю и исследовательские автономные. В связи с этим считается, что комплекс, включающий аппараты этих трех типов, является оптимальным для решения широкого круга задач. Вместе с тем многие специалисты высказывали мнение, что такие аппараты должны быть, как правило, многофункциональными, основанными на модульной технологии, сменном оборудовании и способности к функциональной перестройке.
Использование новых технологий значительно расширило сферу применения АНПА. В настоящее время имеется значительное число проектов и действующих разработок, ориентированных не только на ранее сложившиеся сравнительно доступные применения, но и на выполнение совершенно новых работ по океанографии, обслуживанию различных отраслей и военных программ.
Развитие приоритетных направлений в подводной робототехнике предполагает разработку системных архитектур, моделей и методов интеллектуального управления и ориентирования в пространстве, обеспечивающих безопасность и «живучесть» автономных подводных роботов при работе в неопределенных и экстремальных условиях среды. Первостепенное значение имеет оптимальное решение задач навигации и управления на основе интегральной обработки всей имеющейся информации о среде и состоянии подводного робота. К числу подобных задач можно отнести приведение подводного робота в заданную точку или область пространства, оперативный анализ сцен, принятие решений в сложных и экстремальных условиях среды. Одной из актуальных задач интеллектуализации системы управления АНПА является построение универсальных моделирующих комплексов, позволяющих генерировать виртуальную среду, визуализировать миссии аппарата и поддерживать в режиме имитации работу сенсорных устройств. Наряду с этим предполагается и решение более сложной задачи по 3D-реконструкции подводной среды, что необходимо, например, для планирования в реальном времени пространственного маршрута робота средствами его собственного интеллекта. В составе таких средств необходимым элементом является проблемно-ориентированная геоинформационная система, предназначенная для интерактивного отображения подводной обстановки и управления роботом.
В решении отмеченных выше общих проблем можно отметить тенденцию к сближению функциональных свойств автономных и телеуправляемых подводных роботов и созданию достаточно универсальных информационно взаимодействующих группировок из относительно простых, надежных и эффективных аппаратов. Некоторые из проблем уже решаются на современном уровне их понимания, другие найдут свое разрешение в ближайшее время. Так например создание малых автономных аппаратов с энергоемкими и возобновляемыми источниками питания дает возможность реализовать автоматизированную сеть океанографических измерений и освещения подводной обстановки на обширных просторах Мирового океана. Аналогичные успехи могут быть достигнуты при создании высокоточных интегрированных систем подводной навигации на основе бортовых автономных, гидроакустических и спутниковых технологий. Многие современные автономные аппараты уже имеют в своем составе навигационные комплексы, позволяющие осуществлять коррекцию своего местоположения при выполнении работ, связанных с повышенными требованиями по дальности и точности навигации.
Развитие робототехнического комплекса напрямую зависит от технологической основы, способной реагировать на все возрастающие требования к тактико-техническим и функциональным характеристикам аппаратов и их систем. В этом отношении имеющийся опыт применения модульной технологии, конечно, нельзя приуменьшить, однако и он требует соответствующего анализа и обобщения с учетом мировых тенденций. В связи с этим можно отметить наиболее актуальные проблемы, традиционно связанные с выполнением различного рода продолжающихся и инновационных проектов. К их числу можно отнести:
- внедрение новых системных технологий на основе унифицированных элементов, позволяющих строить различные конфигурации аппаратных и программных средств, производить реконфигурирование структуры в зависимости от задачи и реальных условий работы;
- организацию метрологической экспериментальной базы для разработки, испытаний и опытной эксплуатации образцов создаваемой техники.
Важный аспект в современном развитии АНПА связан с миниатюризацией электронных систем и аппаратов в целом. В архитектуре малоразмерных аппаратов и их систем широкое применение находят микроэлектронные структуры и технологии. Особенно актуальной данная проблема выглядит при серийном производстве малых аппаратов, предназначенных для проведения работ в пределах небольших глубин. Миниатюризация отдельных электронных (микропроцессорных, сенсорных и исполнительных) устройств актуальна для аппаратов любого типа, однако во многих случаях при создании глубоководных аппаратов существуют пределы миниатюризации, обусловленные заданными тактико-техническими требованиями. Тем не менее при создании специализированных подводных роботов, решающих ограниченный класс задач, прогресс может быть особенно ощутим. Созданные в последние годы автономные подводные роботы уже могут служить прототипами для «интеллектуальных» аппаратов следующего поколения.
Институт проблем морских технологий (ИПМТ) ДВО РАН, являясь ведущей организацией в России в области подводной робототехники, приобрел уникальный опыт создания и практического использования подводных роботов различного назначеия, их систем и комплексов. В настоящее время в Институте проводятся научно-исследовательские работы по теме: «Исследование приоритетных направлений создания подводных робототехнических комплексов для автоматизированного обследования водной среды и рельефа дна, морских инфраструктур, физических полей океана», входщей в программу научных исследований на основе бюджетного финансирования. Одновременно осуществляются научно-исследовательские и опытно-конструкторские работы, выполняемые на основе государственных заданий в интересах различных ведомств.
|
|
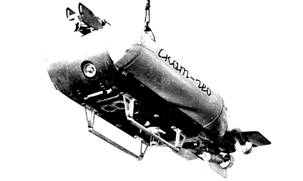 АНПА «Скат-гео». Создан по заказу ЦНИИГАиК в 1976 г. на основе АНПА «Скат» - первого в стране экспериментального АНПА с программным управлением и гидроакустической навигацией для решения исследовательских задач на шельфе. Испытания и опытные работы проводились на геодезиическом полигоне в Белом море (1978). После модернизации в 1991-1992 г.г. использовался совместно с ТПА «Макс-2» для биологических исследований на Тихоокеанском побережье Дальнего Востока.
АНПА «Скат-гео». Создан по заказу ЦНИИГАиК в 1976 г. на основе АНПА «Скат» - первого в стране экспериментального АНПА с программным управлением и гидроакустической навигацией для решения исследовательских задач на шельфе. Испытания и опытные работы проводились на геодезиическом полигоне в Белом море (1978). После модернизации в 1991-1992 г.г. использовался совместно с ТПА «Макс-2» для биологических исследований на Тихоокеанском побережье Дальнего Востока.
|
|
 Глубоководный обзорно-поисковый робото-технический комплекс «Лортодромия». АНПА «Л-2» во время испытаний в Филиппинском море (1980). Создан на основе модульной технологии, унификации элементов бортовых систем, преемственности при реконфигурации структуры. В 1982-1983 г.г. в комплексе с буксируемым аппаратом использовался в работах по детальному обследованию района катастрофы АПЛ «К-8» и северной Атлантике, при обследовании района гибели южно-корейского пассажирского самолета вблизи о.Сахалин. Следующая глубоководная операция состоялась в 1987 г., когда с помощью аппарата «Л-2» производилось обследование АПЛ «К-219», потерпевшей аварию в Саргассовом море вблизи Бермудских островов. Весной 1989 года глубоководный комплекс, включая аппарат «Л-2», использовался для обследования АПЛ «Комсомолец», затонувшей в Норвежском море.
Глубоководный обзорно-поисковый робото-технический комплекс «Лортодромия». АНПА «Л-2» во время испытаний в Филиппинском море (1980). Создан на основе модульной технологии, унификации элементов бортовых систем, преемственности при реконфигурации структуры. В 1982-1983 г.г. в комплексе с буксируемым аппаратом использовался в работах по детальному обследованию района катастрофы АПЛ «К-8» и северной Атлантике, при обследовании района гибели южно-корейского пассажирского самолета вблизи о.Сахалин. Следующая глубоководная операция состоялась в 1987 г., когда с помощью аппарата «Л-2» производилось обследование АПЛ «К-219», потерпевшей аварию в Саргассовом море вблизи Бермудских островов. Весной 1989 года глубоководный комплекс, включая аппарат «Л-2», использовался для обследования АПЛ «Комсомолец», затонувшей в Норвежском море.
|
|
 АНПА «Тифлонус». В 1986 г. по заказу ГУНиО была начата разработка аппарата, предназначенного для батиметрической съемки дна, гравиметрических измерений, измерений фазовой структуры акустических полей и флуктуаций течений, как в открытом океане, так и подо льдом Арктики. Для оценки условий эксплуатация аппарата с ледовой базы, были проведены исследования, конструкторские проработки и натурные эксперименты, цель которых состояла в проверке возможности осуществления «подледной» навигации и приведения аппарата по сигналам акустического и электромагнитного маяков. В дальнейшем макет аппарата был модифицирован и на его основе был создан аппарат «Тифлонус», служивший для отработки новых систем и проведения ряда прецизионных акустических и гравиметрических измерений.
АНПА «Тифлонус». В 1986 г. по заказу ГУНиО была начата разработка аппарата, предназначенного для батиметрической съемки дна, гравиметрических измерений, измерений фазовой структуры акустических полей и флуктуаций течений, как в открытом океане, так и подо льдом Арктики. Для оценки условий эксплуатация аппарата с ледовой базы, были проведены исследования, конструкторские проработки и натурные эксперименты, цель которых состояла в проверке возможности осуществления «подледной» навигации и приведения аппарата по сигналам акустического и электромагнитного маяков. В дальнейшем макет аппарата был модифицирован и на его основе был создан аппарат «Тифлонус», служивший для отработки новых систем и проведения ряда прецизионных акустических и гравиметрических измерений.
|
|
 АНПА «МТ-88». Создан в 1988 г. для океанографических исследований и геологической разведки морского дна. Функциональная структура аппарата реализована на основе бортовой локальной вычислительной сети. Глубоководные испытания «МТ-88» состоялись в Тихом океане летом 1989 г. во время очередного полугодового рейса научно-исследовательского судна «Геолог Петр Антропов» производственного объединения «Дальморгеология». Испытания были совмещены с опытно-производственными работами по детальному обследованию отдельных участков дна в районе разлома Кларион-Клиппертон с залежами железомарганцевых конкреций. На участке с различными геоморфологическими структурами и перепадами глубин от 4200 до 4600 м с помощью АНПА было проведено гидроакустическое, фото–видео профилирование дна, отработаны методические приемы работы.
АНПА «МТ-88». Создан в 1988 г. для океанографических исследований и геологической разведки морского дна. Функциональная структура аппарата реализована на основе бортовой локальной вычислительной сети. Глубоководные испытания «МТ-88» состоялись в Тихом океане летом 1989 г. во время очередного полугодового рейса научно-исследовательского судна «Геолог Петр Антропов» производственного объединения «Дальморгеология». Испытания были совмещены с опытно-производственными работами по детальному обследованию отдельных участков дна в районе разлома Кларион-Клиппертон с залежами железомарганцевых конкреций. На участке с различными геоморфологическими структурами и перепадами глубин от 4200 до 4600 м с помощью АНПА было проведено гидроакустическое, фото–видео профилирование дна, отработаны методические приемы работы.
|
|
 АНПА «CR-01». В 1991 г. по контракту с Шеньянским институтом автоматики Академии наук КНР была начата совместная разработка АНПА «CR-01», положившую начало российско-китайскому сотрудничеству в области морских технологий. АНПА «CR-01» предназначен для океанографических исследований и обследования запасов полезных ископаемых на глубинах до 6000 м. Аппарат успешно прошел сдаточные испытания в Тихом океане, которые состоялись в конце лета 1995 г., а в мае-июне 1997 г. использовался в опытно-методических работах в глубоководном районе Тихого океана, богатом железомарганцевыми конкрециями. В рамках последующего проекта был создан АНПА «CR-02», аналогичный по конструкции «CR-01».
АНПА «CR-01». В 1991 г. по контракту с Шеньянским институтом автоматики Академии наук КНР была начата совместная разработка АНПА «CR-01», положившую начало российско-китайскому сотрудничеству в области морских технологий. АНПА «CR-01» предназначен для океанографических исследований и обследования запасов полезных ископаемых на глубинах до 6000 м. Аппарат успешно прошел сдаточные испытания в Тихом океане, которые состоялись в конце лета 1995 г., а в мае-июне 1997 г. использовался в опытно-методических работах в глубоководном районе Тихого океана, богатом железомарганцевыми конкрециями. В рамках последующего проекта был создан АНПА «CR-02», аналогичный по конструкции «CR-01».
|
|
 АНПА «ОКРО-6000». Разработан по контракту с корпорацией DAEWOO (Республика Корея). Аппарат предназначен для океанологических исследований на глубинах до 6000м, но по своему устройству может решать и другие задачи научного и коммерческого характера. Первые морские испытания аппарата состоялись в мае 1996 г. вблизи острова Донг-До в Японском море на глубинах 2300 м. Заключительные испытания аппарата проводились летом 1998 г. в районе Микронезии, в котором специалистами KORDI ежегодно проводятся работы по обследованию залежей минерального сырья.
АНПА «ОКРО-6000». Разработан по контракту с корпорацией DAEWOO (Республика Корея). Аппарат предназначен для океанологических исследований на глубинах до 6000м, но по своему устройству может решать и другие задачи научного и коммерческого характера. Первые морские испытания аппарата состоялись в мае 1996 г. вблизи острова Донг-До в Японском море на глубинах 2300 м. Заключительные испытания аппарата проводились летом 1998 г. в районе Микронезии, в котором специалистами KORDI ежегодно проводятся работы по обследованию залежей минерального сырья.
|
|
 АНПА –ПТА«TSL» (Tunnel Sea Lion). Проект автономно–привязного аппарата «TSL» был разработан в 1994 г. по предложению фирмы Hibbard Marine (США) для выполнения работ по обследованию протяженных водоводов. На первом этапе «TSL» проектировался как автономный аппарат, но в дальнейшем он подвергался модернизации. По завершению контракта с фирмой-заказчиком аппарат в автономно-привязном варианте стал использоваться для отработки различных систем АНПА и проведения опытных работ по экологическому мониторингу и изучению морских биологических объектов.
АНПА –ПТА«TSL» (Tunnel Sea Lion). Проект автономно–привязного аппарата «TSL» был разработан в 1994 г. по предложению фирмы Hibbard Marine (США) для выполнения работ по обследованию протяженных водоводов. На первом этапе «TSL» проектировался как автономный аппарат, но в дальнейшем он подвергался модернизации. По завершению контракта с фирмой-заказчиком аппарат в автономно-привязном варианте стал использоваться для отработки различных систем АНПА и проведения опытных работ по экологическому мониторингу и изучению морских биологических объектов.
|
|
 Солнечный АНПА (САНПА). Создан на основе совместного проекта с институтом автономных подводных систем (AUSI, США). Проект был направлен на решение проблемы увеличения автономности АНПА путем утилизации энергии солнечного излучения. В 1998 г. в ИПМТ и AUSI впервые в мире были изготовлены два макетных образца САНПА, и затем были проведены их испытания с целью проверки заложенных принципов. На аппарате, разработанном в ИПМТ в течение 1999–2001 г.г. был апробирован ряд системных конфигураций для навигации, управления и энергообеспечения, и на заключительном этапе аппарат успешно прошел методические морские испытания в заливе Петра Великого Японского моря. В последующем системы аппараты были модернизированы, и в современном исполнении аппарат используется для экспериментальных исследований и отработки технологии долговременных автоматизированных работ в океане.
Солнечный АНПА (САНПА). Создан на основе совместного проекта с институтом автономных подводных систем (AUSI, США). Проект был направлен на решение проблемы увеличения автономности АНПА путем утилизации энергии солнечного излучения. В 1998 г. в ИПМТ и AUSI впервые в мире были изготовлены два макетных образца САНПА, и затем были проведены их испытания с целью проверки заложенных принципов. На аппарате, разработанном в ИПМТ в течение 1999–2001 г.г. был апробирован ряд системных конфигураций для навигации, управления и энергообеспечения, и на заключительном этапе аппарат успешно прошел методические морские испытания в заливе Петра Великого Японского моря. В последующем системы аппараты были модернизированы, и в современном исполнении аппарат используется для экспериментальных исследований и отработки технологии долговременных автоматизированных работ в океане.
|
|
 АНПА «МТ-98». Предназначался для отработки сложных поисково-обследовательских задач на глубинах до 6000 м. Использовался в качестве прототипа АНПА, оснащенного комплексом аппаратуры для выполнения длительных подводных работ при обследовании объектов и акваторий, в морской поисковой операции в районе гибели военного вертолета в марте 2003 г.
АНПА «МТ-98». Предназначался для отработки сложных поисково-обследовательских задач на глубинах до 6000 м. Использовался в качестве прототипа АНПА, оснащенного комплексом аппаратуры для выполнения длительных подводных работ при обследовании объектов и акваторий, в морской поисковой операции в районе гибели военного вертолета в марте 2003 г.
|
|
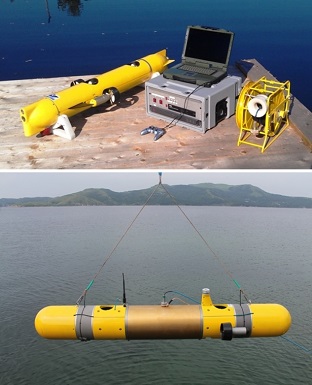
 АНПА «ММТ-3000» (Малый морской технолог). Предназначен для решения широкого круга задач на глубинах до 3000 м, включая: съемку и картографирование рельефа дна с целью планирования прокладки трубопроводов, кабелей, строительства и обследования донных сооружений, разведки полезных ископаемых на дне и в толще грунта, экологических исследований, выполнения поисковых операций.
АНПА «ММТ-3000» (Малый морской технолог). Предназначен для решения широкого круга задач на глубинах до 3000 м, включая: съемку и картографирование рельефа дна с целью планирования прокладки трубопроводов, кабелей, строительства и обследования донных сооружений, разведки полезных ископаемых на дне и в толще грунта, экологических исследований, выполнения поисковых операций.
|
|
 АНПА «Клавесин-1Р» – глубоководный многоцелевой комплекс, оснащенный современными средствами автономной и гидроакустической навигации и связи, реконфигурируемой системой управления, целевой аппаратурой для выполнения обзорно-поисковых и обследовательских работ на глубинах до 6000м, съемки и картографирования морского дна, инспекции инженерных инфраструктур, кабельных линий связи и других коммуникаций. Прошел экспериментальные испытания в Японском море и Курильско-Камчатском глубоководном желобе (2005-2006), опытную эксплуатацию на континентальном шельфе в Арктике (2007) и при поиске затонувшего радиоизотопного источника в Охотском море , (2009), при обследовании места крушения военного самолета в Татарском проливе (2010), при обследовании акваторий залива петра Великого (2013-2015).
АНПА «Клавесин-1Р» – глубоководный многоцелевой комплекс, оснащенный современными средствами автономной и гидроакустической навигации и связи, реконфигурируемой системой управления, целевой аппаратурой для выполнения обзорно-поисковых и обследовательских работ на глубинах до 6000м, съемки и картографирования морского дна, инспекции инженерных инфраструктур, кабельных линий связи и других коммуникаций. Прошел экспериментальные испытания в Японском море и Курильско-Камчатском глубоководном желобе (2005-2006), опытную эксплуатацию на континентальном шельфе в Арктике (2007) и при поиске затонувшего радиоизотопного источника в Охотском море , (2009), при обследовании места крушения военного самолета в Татарском проливе (2010), при обследовании акваторий залива петра Великого (2013-2015).
|
|
 АНПА «МТ-2010» - создан по заказу МЧС РФ для выполнения оперативного мониторинга подводной обстановки с целью выявления опасных ситуаций, объектов или процессов на глубинах до 3000 м (2010). Пилотный образец АНПА, получивший название Пилигрим, прошел государственные испытания и опытную эксплуатацию в Дальневосточных морях (2011-2013), опытную эксплуатацию в Карском море при выполнении поисково-обследовательских работ с целью обнаружения и идентификации потенциально опасных подводных объектов. .
АНПА «МТ-2010» - создан по заказу МЧС РФ для выполнения оперативного мониторинга подводной обстановки с целью выявления опасных ситуаций, объектов или процессов на глубинах до 3000 м (2010). Пилотный образец АНПА, получивший название Пилигрим, прошел государственные испытания и опытную эксплуатацию в Дальневосточных морях (2011-2013), опытную эксплуатацию в Карском море при выполнении поисково-обследовательских работ с целью обнаружения и идентификации потенциально опасных подводных объектов. .
|
|
 Робототехнический комплекс «МТ-2012» (Галтель) - предназначен для выполнения поисково-обследовательских работ, охраны подводных акваторий, инспекции и контроля инженерных инфраструктур на глубинах до 300 м. Комплекс содержит два автономных аппарата (АНПА), один телеуправляемый аппарат (ТНПА) и комплект навигационного, вспомогательного и обеспечивающего оборудования.
Робототехнический комплекс «МТ-2012» (Галтель) - предназначен для выполнения поисково-обследовательских работ, охраны подводных акваторий, инспекции и контроля инженерных инфраструктур на глубинах до 300 м. Комплекс содержит два автономных аппарата (АНПА), один телеуправляемый аппарат (ТНПА) и комплект навигационного, вспомогательного и обеспечивающего оборудования.
|
|
 Малоразмерный ТНПА «Чилим» (2014) - предназначен для решения специальных задач, поиска и уничтожения опасных подводных объектов в прибрежнх морских акваториях. Проект выполнен при научно-техническом сотрудничестве с ФГУП «Российский Федеральный Ядерный Центр – Всероссийский НИИ технической физики имени академика Е.И Забабахина» (РФЯЦ-ВНИИТФ, г. Снежинск). На базе ТНПА «Чилим» создан гибридный глайдер «Монитор» с гидравлической системой регулирования плавучести.
Малоразмерный ТНПА «Чилим» (2014) - предназначен для решения специальных задач, поиска и уничтожения опасных подводных объектов в прибрежнх морских акваториях. Проект выполнен при научно-техническом сотрудничестве с ФГУП «Российский Федеральный Ядерный Центр – Всероссийский НИИ технической физики имени академика Е.И Забабахина» (РФЯЦ-ВНИИТФ, г. Снежинск). На базе ТНПА «Чилим» создан гибридный глайдер «Монитор» с гидравлической системой регулирования плавучести.

